Loveland Company Helps Japan With Robot Design For Fukushima Cleanup
LOVELAND, Colo. (CBS4) - Experts tangling with the meltdown at the Fukushima Daiichi facility were trying to figure out how to deal with one of the biggest problems they have; how to even look at how bad it is.
Three of the six nuclear reactors at Fukushima had meltdowns in the 2011 earthquake and tidal wave.
The containment vessel in reactor number two hasn't been containing since. Radioactive water continues to leak.
"We said that's something we know we can help with," said Marc Rood, a Colorado School of Mines grad and business manager at the Kurion company offices in Loveland.

Rood and several CSU grads, including engineering manager Matt Cole knew they could come up with a solution.
"We built a very similar system to this in the UK approximately four years ago that the Japanese saw," said Rood. "Once they saw that said that's a system that could help solve our problem."
California-based Kurion absorbed a Northern Colorado company that has been designing robotic systems for nuclear sites for years. The work started with the design of equipment to help with the Rocky Flats cleanup two decades ago.
Cole said there are a lot of limitations to designing the robotic arm they needed.
"We can't do anything about the facility, so the size of the facility, it sounds like a small issue, but the arm has to actually go through the doorway, so the height of that doorway is a huge restriction on us for how big the machine can be."
Add to that, the fact that the building is still radioactive. Workers can get into the floor above the containment area, but only for 10 minutes before they have to get back out. Below in the containment area water continues to leak. It's flooded and it's highly radioactive.
"So there's some heat. There's lots of water, so we have to think about corrosion. There's lots of sea water in the facility. There are some of those harsh facilities and it's dark."
The arm has to be anchored in that floor above, then reach down through a small hole in the floor and telescope out.

They decided the arm needed several things including cutting tools to get through the debris at the bottom of the containment vessel and remotely operated vehicles or ROVs. The ROVs would have to have radiation hardened cameras.
"Once we understand where the leaks are we can start to address how to plug those leaks."
But that's just some of the challenges.
How do you create ROVs that can move around in those conditions?
"One is a submersible that swims around in the water and one is actually a magnetic crawler that crawls around on a pipe and the third one is also a crawler."
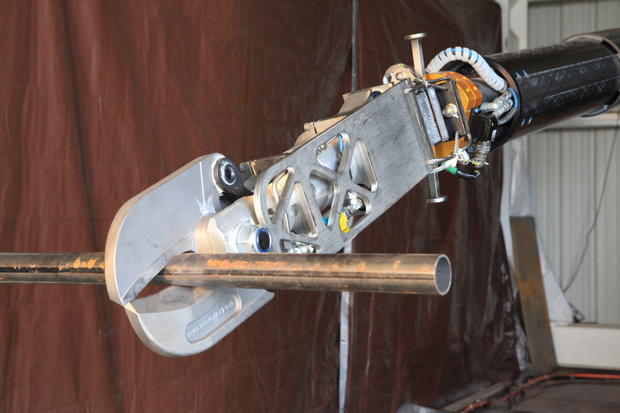
Getting them where they need to be is another challenge. The containment vessel is full of obstacles and debris. The arm has two cutting tools. One is a powerful pair of pinchers. Video supplies by Kurion shows it snapping off a railing-like pipe.
The other is a super powerful squirt gun.
"We pump up water to about 50 thousand PSI, which is an incredible amount of pressure. And we push it through actually a tiny diamond orifice and it comes out about 2000 miles an hour."
They add a little sand and the water jet is powerful enough to cut through concrete or steel.
It took a year. Kurion shipped the arm to Japan several weeks ago, where cleanup workers are practicing with a mock-up of the reactor.
When they're ready, they'll go in for real. It will take a few days to weeks to map the inside of the containment vessel. Once the leaks are mapped, then they're onto the next step.
"We're in the midst of our design effort for the repair system that will come in and actually repair these leaks," said Rood. "It's going to look very similar, it's going to be another robotic arm."
That robotic arm will grout the holes with a concrete like mixture.
This arm could be used in the other two reactors, but ultimately it, too, will become radioactive waste. Each step in the process at Fukushima moves at an excruciatingly slow pace. The entire cleanup will take decades -- maybe 60 years. Kurion may have a lot of work ahead.



